
Partnered by DLG Feldtage and this year, for the first time, held in virtual format on DLG’s digital platform, the 18th international Field Robot Event, a field robot contest for international student teams, ended on a high note with the announcement of the winners, presented by the organisers, Hohenheim University and Wageningen University.
The overall winner of the 2021 event is the Bullseye team from Wageningen University, the Netherlands, who was judged on its performance in four set field tasks that included navigation in curved maize rows, in straight rows with or without missing plants, weed and litter recognition and subsequent removal to the headland. The freestyle event, an optional event that allows the student teams to show off their engineering prowess solving a self-selected agricultural task, was won by the Ceres team, Münster University of Applied Sciences with its harvesting robot that was able to detect and pick pumpkins.
518 international viewers tune in
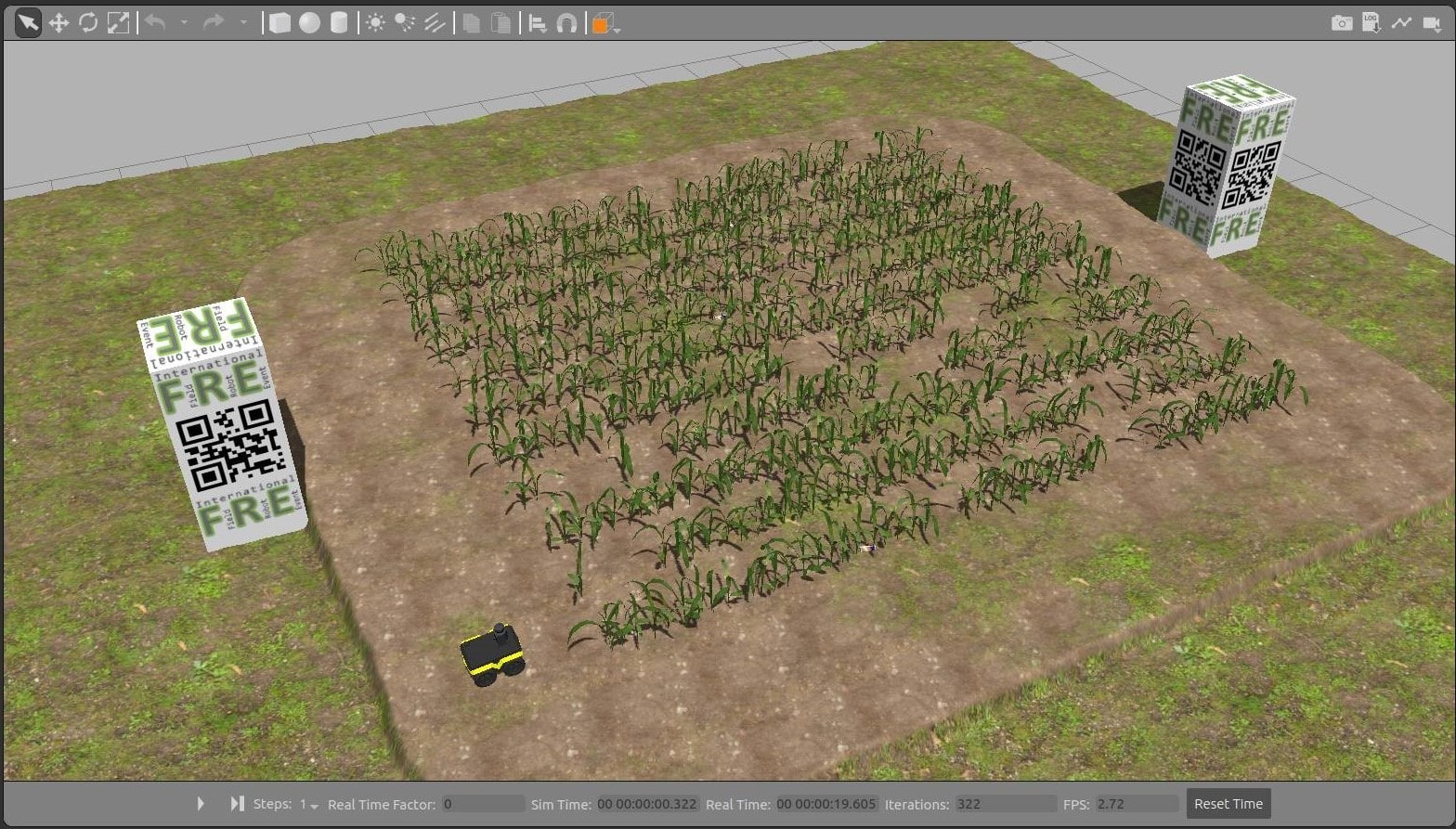
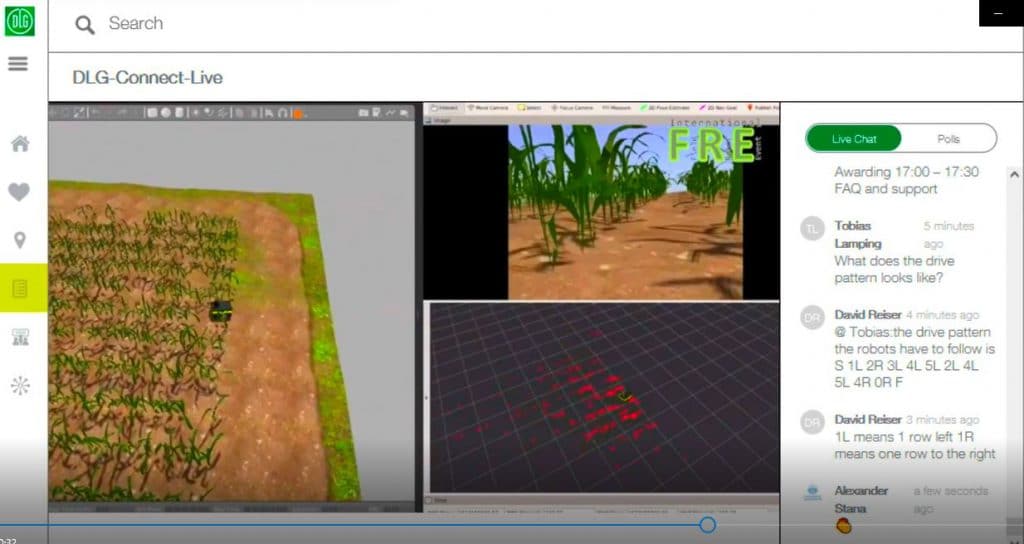
The event attracted 518 viewers from all over the world, comprising not only technical and academic specialists, engineers, university staff and students, but also farmers from a range of countries. Industry participants such as product managers also attended the live event, which was covered by international journalists, tuning in to watch the robots performing in a photo-realistic simulation environment similar to that used by NASA for space exploration. Via a live chat, viewers had the chance to interact with the 14 international teams from Denmark, Germany, the Netherlands, Romania, and Slovenia, as well experts and other viewers.
Collaboration Award
The honorary Collaboration Award was awarded to Kamaro Engineering, a student engineering team for innovative field robots from Karlsruhe Institute of Technology (KIT). The collaboration award recognizes the contribution to the development of the virtual maize field in the simulated environments. This work involved writing code that accurately described what a maize plant and other components look like as well as creating real-life effects like wind and shadows to enact a range of agricultural field scenarios, especially weed recognition and obstacle detection.
Two teams of school-age talents
This year, two teams – Carbonite and Camper Robotic – consisted of school-aged children with technical talents from the German cities Hamburg and Überlingen respectively. The Camper Robotic team had developed a unique “Segway” type of robot called Field Balancer. The Carbonite team excelled in several tasks, coming third overall.
“This virtual event was a premiere and we are very pleased with the result and the feedback from the students. A simulated environment is a large part of the development work for a field robot. I believe this event, taking place live in a simulated environment, is a great and challenging exercise to not only establish what the system is capable of but also benchmark it with other teams. This will have significant learning benefits for many months to come,” said Prof. Hans W. Griepentrog, Director, Section of Technology in Crop Production, University of Hohenheim, Germany.
“The ROS Gazebo simulation environments, which we created especially for this event, have been useful to the student teams and therefore we’ve decided to keep them available after the contest, so that students can test their future field robot simulations on that platform,” concluded Prof Griepentrog.
Freestyle event – future concepts
The freestyle task within the event is always a spectator highlight and offers a window into the future with visionary concepts for field applications, selected and developed by the teams themselves. An optional category in the contest, the task offered the student teams the opportunity to show their skills at developing a solution for a practical field task of their choice. At this year’s event, the freestyle tasks were presented by the students as videos. Freestyle tasks included a harvesting robot from Ceres, winning the freestyle category. Coming second, developed by the FarmBeast team, Maribor University, was a spraying implement capable of recognising weed and target-spraying only where needed, contributing to soil protection. In third place was the Kamaro team with its Beteigeuze field robot, presenting itself as a modular self-configuring field robot with multiple attachments, including trailer-based implements.
The international field robot event is an international field robot contest encompassing various field tasks. Navigating the robot between curved crop rows, recognizing objects that are weed or simply rubbish and mapping the objects using geo-referencing are part of the challenges that are solved by the field robots using sensors and algorithms. Interpreting the information in realtime, like determining what is weed using a camera is complex, and requires many months of prior development work. A further task required removing the weed and litter, where accurate software-control of the actuators that operate the tool is needed. The challenge is to make intelligent sense of the data on the day, which involves the robot interpreting the given information and make optimal decisions. Complexity, performance and agricultural usefulness were key judging criteria.
Videos of contest available
On demand videos of the three day field robot event, which include all simulated field tasks, commentary by the judges and the videos submitted by the teams for the freestyle task, are available on DLG’s online platform as separate links for each event day:
8 June: Navigation in a maize field with curved rows; Straight rows with missing plants.
9 June: Weed and object detection and georeferencing; removal to the headland.
10 June: Freestyle Event.
Full details of the winners of each of the five categories and their scores are available on. https://www.fieldrobot.com/event/
The international field robot event was held on the DLG’s digital platform, which is also home to large-scale digital agricultural events. The platform is a connection platform that offers its users both product content and individual, group or public interactions.
Practical field robot research since 2003
The field robot contest, which was launched in 2003 by Wageningen University in the Netherlands, tests pioneering robotics and precision farming technologies under real-world conditions, and gives young scientists the opportunity to exchange and develop their ideas alongside their peers. Like the field event, the competitors in the virtual event had the opportunity to interact with each other and with the international viewers. This interaction is an important part of the event and helped them advance their concepts.
The 2021 Field Robot Event, which has been held at the DLG-Feldtage exhibition since 2014, provided demanding virtual tests for the robots and their inventors, as well as exciting entertainment for the virtual viewers.












